Автономна навігація дронів без GPS-сигналу
Команда QuData розробила платформу автономної навігації для дронів, яка поєднує візуальну одометрію, інерційні датчики та ультразвукову навігацію (Multipoint LiDAR). Система забезпечує стабільне керування дронами та їх точне позиціонування навіть за умов повної відсутності GPS. Наше рішення орієнтоване для застосування у промисловості та замкнутих просторах.

 Завдання
Завдання
Наразі дрони широко використовують GPS для навігації та стабілізації польоту. Однак у закритих приміщеннях або зонах із поганим сигналом GPS їх використання обмежене. У випадках, коли сигнал GPS недоступний або ненадійний, безпілотники втрачають свої основні переваги: точність, надійність і безпеку.
Це стає особливо критичним для таких галузей як: гірничодобувна промисловість, нафто- та газовидобувна промисловість, енергетична сфера і аварійно-рятувальні операції, де дрони можуть виконувати важливі завдання в важкодоступному або замкненому просторі. Потреба в безпілотниках, здатних працювати незалежно від наявності GPS-сигналу, стає все більш очевидним завданням, яке вимагає інноваційних рішень.
 Огляд рішення
Огляд рішення
У відповідь на виклик відсутності GPS була розроблена інтегрована платформа, яка включає як апаратні, так і програмні компоненти для створення автономних дронів.
Одним із таких рішень є розробка на основі платформи QuDrone, що включає інтеграцію штучного інтелекту (ШІ) та машинного навчання (МН) для керування безпілотними літальними апаратами (БПЛА) в умовах відсутності GPS-сигналу.
Платформа використовує кросплатформний симулятор AirSim, який базується на ігровому рушії Unreal Engine. AirSim дозволяє створювати та тестувати алгоритми керування дронами у віртуальному середовищі, імітуючи різні сценарії та умови польоту. Платформа забезпечує розробку та тестування алгоритмів візуальної одометрії, пошуку, класифікації та визначення об'єктів на поверхні землі з використанням емуляторів датчиків та елементів візуальної зйомки.
Крім того, для апаратної частини була обрана платформа на базі мікрокомп'ютера Raspberry Pi, що забезпечує компактність і продуктивність роботи в режимі реального часу. Це рішення підтримує широкий спектр периферійних пристроїв та різних архітектур, необхідних для інтеграції та тестування різних систем.
 Технічні деталі
Технічні деталі
Використання візуальної одометрії та Simultaneous Localization and Mapping (SLAM) дозволяє дрону визначати своє місцезнаходження та орієнтуватися в просторі, використовуючи дані з камер та інших сенсорів. Ця технологія забезпечує автономну навігацію навіть за повної відсутності сигналів GPS.
Інерційні вимірювальні пристрої (IMU), у тому числі акселерометри та гіроскопи, допомагають дронам підтримувати стабільність і орієнтуватися в просторі на основі відомостей про прискорення та кутову швидкість. Це особливо важливо в умовах, де потрібна висока точність маневрування та позиціонування.
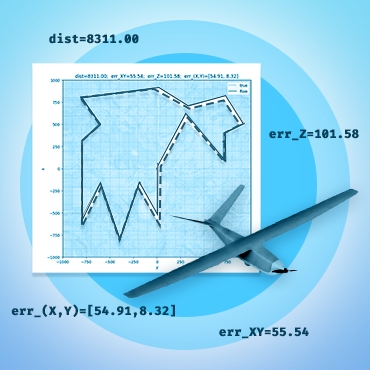
Основні помилки виникають під час польоту над поверхнями з невеликою кількістю візуальних орієнтирів для ідентифікації руху, наприклад, над озерами, річками тощо. При польоті на малій висоті (до 50 метрів) певні проблеми також створюють перепади висот і високі об'єкти (невизначеність у відстані до землі за відсутності далекоміра). Збільшення висоти польоту знижує вплив цих факторів.
Навігація безпілотників без використання сигналів GPS – важливе досягнення для галузей, які потребують надійних рішень для роботи в замкнутому просторі та складних умовах. Інтеграція технологій візуальної одометрії, IMU та ультразвукової навігації (Multipoint LiDAR) дозволяє дронам безпечно та ефективно виконувати завдання там, де традиційні методи навігації не працюють. Цей інноваційний підхід особливо важливий для служб екстреного реагування, гірничодобувної, нафто- і газовидобувної та енергетичної галузей, підвищуючи надійність та ефективність роботи безпілотників. У міру розробки та тестування цих автономних систем потенціал їх застосування у різних сферах стає все більш перспективним.
Стек технологій

OpenCV

C++

Python

BetaFlight
