Автономная навигация дронов без GPS-сигнала
Команда QuData разработала платформу автономной навигации для дронов, объединяющую визуальную одометрию, инерциальные датчики и ультразвуковую навигацию (Multipoint LiDAR). Система обеспечивает стабильное управление дронами и их точное позиционирование даже при полном отсутствии GPS. Наше решение ориентировано на применение в промышленности и замкнутых пространствах.

 Задача
Задача
Современные дроны широко используют GPS для навигации и стабилизации полета. Однако в помещениях или зонах с плохим сигналом GPS их использование ограничено. В условиях, когда GPS недоступен или ненадежен, беспилотники теряют свои основные преимущества: точность, надежность и безопасность.
Это становится особенно критичным для таких отраслей как: горнодобывающая, нефтегазовая, энергетическая, аварийно-спасательная, где дроны могут выполнять важные задачи в труднодоступных или замкнутых пространствах. Необходимость в дронах, способных функционировать без зависимости от наличия GPS-сигнала, становится все более очевидной задачей, требующей инновационных решений.
 Обзор решения
Обзор решения
В ответ на задачу, представленную отсутствием GPS, была разработана интегрированная платформа, включающая как аппаратные, так и программные компоненты для создания автономных дронов.
Одним из предложенных решений является разработка на базе платформы QuDrone, включающая интеграцию искусственного интеллекта (ИИ) и машинного обучения (МО) для управления беспилотными летательными аппаратами (БПЛА) в условиях отсутствия GPS-сигнала.
Платформа предлагает использовать межплатформенный симулятор AirSim, который основан на игровом движке Unreal Engine. AirSim позволяет создавать и тестировать алгоритмы управления дронами в виртуальной среде, которая имитирует различные сценарии и условия полета. Платформа обеспечивает разработку и тестирование алгоритмов визуальной одометрии, поиска, классификации и определения объектов на поверхности земли с использованием эмулированных датчиков и элементов визуальной съемки.
Кроме того, для аппаратной части была выбрана платформа на базе микрокомпьютера Raspberry Pi, что обеспечивает компактность и производительность работы в реальном времени. Это решение поддерживает широкий спектр периферийных устройств и различных архитектур, необходимых для интеграции и тестирования различных систем.
 Технические детали
Технические детали
Использование визуальной одометрии и Simultaneous Localization and Mapping (SLAM) позволяют дрону определять свое местоположение и ориентироваться в пространстве, используя данные с камер и других сенсоров. Эта технология обеспечивает автономную навигацию даже в условиях полной недоступности GPS-сигнала.
Применение инерциальных измерительных устройств (IMU), включая акселерометры и гироскопы, позволяет дронам поддерживать стабильность и ориентироваться в пространстве на основе данных об ускорениях и угловых скоростях. Это особенно важно в условиях, где требуется высокая точность маневрирования и позиционирования.
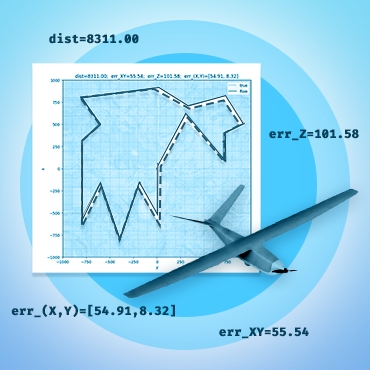
Основные ошибки возникают при полете над поверхностью с малым числом визуальных признаков для идентификации движения таких как озера, реки и т. д. При полете на небольшой высоте (до 50 м) определенные проблемы создают также перепады высот и высокие объекты (неопределенность в расстоянии до земли в отсутствии дальномера). Увеличение высоты полета снижает влияние этих факторов.
Навигация дронов вне зависимости от наличия сигнала GPS – важное достижение для отраслей, нуждающихся в надежных решениях для работы в замкнутых пространствах и сложных условиях. Интеграция технологий визуальной одометрии, IMU и ультразвуковой навигации (Multipoint LiDAR) позволяет дронам безопасно и эффективно выполнять задачи там, где традиционные методы навигации не работают. Этот инновационный подход особенно важен для служб экстренного реагирования, горнодобывающей, нефтегазовой и энергетической отраслей, повышая надежность и эффективность работы беспилотников. По мере разработки и тестирования этих автономных систем потенциал их применения в различных сферах становится все более перспективным.
Стек технологий

OpenCV

C++

Python

BetaFlight
