ML: Нейронные сети в Torch - Справочник
Интерфейсы для слоёв
Этот документ содержит обзор основных типов слоёв, ошибок и оптимизаторов в библиотеке PyTorch. Основы PyTorch описаны здесь, а основы программирования на ней нейронных сетей - здесь.Слои в PyTorch реализованы в двух формах: как функции и как классы.
Первая - это обычные функции, которым передаются параметры слоя и входящий тензор. Например, линейный слой умножает входную матрицу формы (N, nX) на транспонированную матрицу весов W формы (nY, nX) и опционально добавляет вектор смещений bias. На выходе получается тензор (N, nY):
import torch.nn.functional as F N, nX, nY = 1, 2, 3 # число примеров, входов, выходов X = torch.ones(N, nX) # матрица примеров W = torch.ones(nY, nX) # матрица весов B = torch.ones(nY) # вектор смещений Y = F.linear(X, W, B) # [[3., 3., 3.]] Y = X.mm(W.t())+B # тоже самое Y = torch.addmm(B,X,W.t()) # тоже самоеСлои как экземпляры классов, сами создают параметры с начальными случайными значениями.
Ниже обязательными аргументами при создании класса является число входов nX и число выходов nY слоя (число нейронов в нём == число новых признаков). Затем экземпляру fc класса Linear через оператор ( ) передаётся входная матрица X:
import torch.nn as nn
fc = nn.Linear(nX, nY)
Y = fc(X) # tensor([[-0.1559, -0.2140, 0.1462]],
# grad_fn=<Addmm>)
Класс слоя у своих параметров объявляет свойство requires_grad=True. Это приводит к построению вычислительного графа при прямом распространении по сети и к получению градиентов от параметров при обратном распространении:
print(fc.bias) # tensor([ 0.529, -0.103, 0.646], requires_grad=True) print(fc.bias.is_leaf) # True print(fc.bias.grad) # None L = torch.sum(Y*Y) # скалярная "функция ошибки" L.backward() # запускаем вычисление градиентов fc.bias.grad # tensor([-0.3688, 0.6441, -1.6415])
Дальше идёт небольшой справочник наиболее важных типов слоёв, активационных функций и оптимизаторов. За более подробной информацией стоит обратиться к документации.
Базовые слои
Полносвязный слой
✒ nn.Linear… (in_features, out_features, bias=True) [doc]
Осуществляет линейное преобразование $\mathbf{y} = \mathbf{x}\cdot \mathbf{W}^T + \mathbf{b}$. Параметры слоя находятся в атрибутах weight и bias. Матрица весов $\mathbf{W}$ хранится в транспонированном виде (чтобы при перемножении матриц $\mathbf{X}\mathbf{W}^\top$ использовать их строки, а не строку и столбец). Если необходимо задать веса руками, это делается вне вычислительного графа:
fc = nn.Linear(nX, nY)
with torch.no_grad():
fc.weight.copy_(W) # устанавливаем матрицу весов
fc.bias. copy_(B) # устанавливаем вектор смещений
Чтобы заморозить параметры (не менять при обучении) достаточно
отключить у них вычисление градиента: fc.weight.requires_grad = False.
Реализация линейного слоя в torch.nn.functional выглядит следующим образом:
def linear(X, weight, bias=None):
if X.dim() == 2 and bias is not None: # fused op is marginally faster
ret = torch.addmm(bias, X, weight.t()) # bias + X @ weight.t()
else:
output = X.matmul(weight.t())
if bias is not None: output += bias
ret = output
return ret
Пусть in_features=nX, out_features=nY и есть смещение: bias=True.
Входной тензор может иметь произвольное число индексов (многоточие)
и слой так меняет его форму: (N,...,nX) -> (N,...,nY).
Число параметров слоя равно nX*nY + nY.
Эмбеддинг
✒ nn.Embedding… (num_embeddings, embedding_dim, padding_idx=None, max_norm=None, norm_type=2.0,
… scale_grad_by_freq=False, sparse=False, _weight=None)
Слой Embedding преобразует массив целых чисел long на входе в матрицу (массив векторов). Подробнее см. Embedding слов. При создании экземпляра слоя обязательны два первых параметра: размер словаря и размерность эмбеддига. Ниже создаётся слой с 5 словами и их 2-мерными (случайными) векторами:
emb = nn.Embedding(5, 2) X = torch.tensor([0,2,1]) print (emb(X)) print(emb.weight)
tensor([[-1.3062, -1.6261],
[-0.3903, 0.0998],
[ 0.2643, 1.6466]], grad_fn=<Embedding>)
Parameter containing:
tensor([[-1.3062, -1.6261],
[ 0.2643, 1.6466],
[-0.3903, 0.0998],
[-0.5463, -0.5028],
[ 1.3299, -0.0580]], requires_grad=True)
Параметр max_norm задаёт максимальную длину векторов и если при обучении она превышается, вектор перенормируется. В качестве нормы по умолчанию используется сумма квадратов компонент: norm_type = 2.
При параметре scale_grad_by_freq = True градиенты при обучении будут взвешиваться по обратной частоте слов в батче (усиливать изменение более редких слов). Но батч при этом стоит брать достаточно большой. Загрузить готовые векторы можно, создав слой следующим образом:
weight = torch.FloatTensor([[1, 2.3, 3],
[4, 5.1, 6]])
emb = nn.Embedding.from_pretrained(weight) # Создать слой с готовыми векторами
input = torch.LongTensor([1]) # Get embeddings for index 1
emb(input) # tensor([[ 4.0, 5.1, 6.0]])
Параметры функции from_pretrained:
from_pretrained(embeddings, freeze=True, padding_idx=None,
max_norm=None, norm_type=2.0, scale_grad_by_freq=False, sparse=False)
Конволюция
✒ nn.Conv2d… (in_channels, out_channels, kernel_size, stride=1, padding=0, dilation=1, groups=1, bias=True,
… padding_mode='zeros')
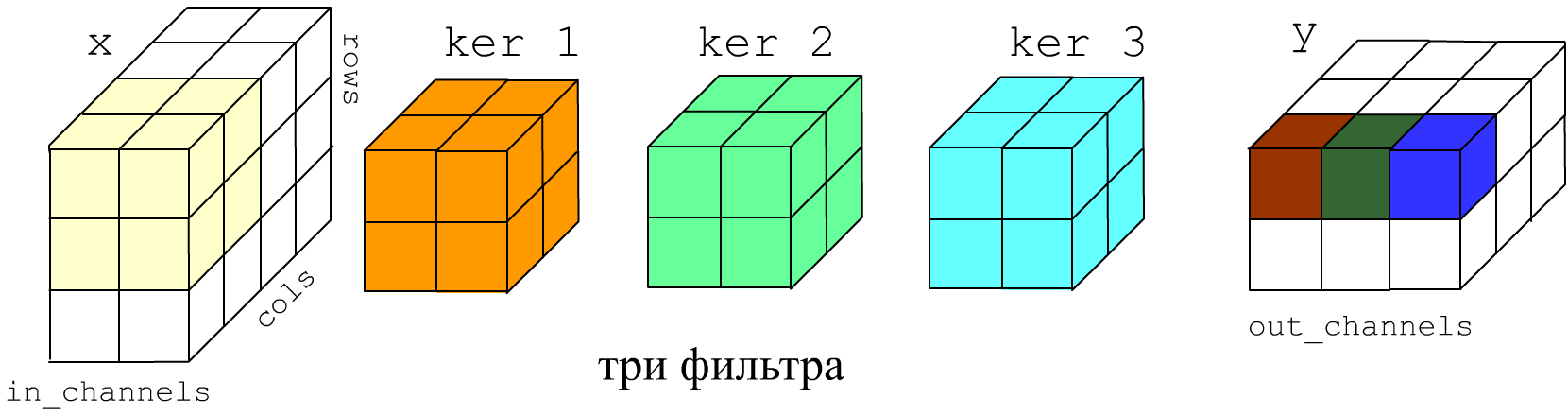
Свёрточный слой Conv2D применяется к "картинкам" высотой rows, шириной cols и имеющих in_channels "цветовых" каналов. На самом деле графические термины условны и слой Conv2D может применяться не только при обработке изображений. Форма входного тензора (N, in_channels, rows, cols). На выходе будет тензор (N, out_channels, rows_out, cols_out) По исходному тензору проходит out_channels фильтров размером kernel_size (число или tuple). Глубина фильтра определяется числом входных каналов in_channels.
Ниже на рисунке in_channels=2, out_channels=3 (три фильтра), размеры фильтров kernel_size = 2 или, что тоже kernel_size = (2,2). Фильтры по умолчанию скользят по картинке с шагом один stride=(1,1), поэтому результирующие ширина и высота картинки на 1 меньше:
Параметр padding (int or tuple) задаёт на сколько "пикселей" необходимо расширить картинку с обоих сторон, перед прохождением по ней фильтрами. Расширенная область заполняется значениями в соответствии с параметром padding_mode: 'zeros', 'reflect', 'replicate', 'circular'. Параметр dilation = 1 задаёт расстояние между пикселями, попадающими в фильтр.
Для примера создадим "картинку" 3x4, левая половина которой белая (1), а правая - чёрная (0) и пройдём по ней фильтром 2x2, выделяющим вертикальный край:
X = torch.zeros(1,1,3,4)
X[0,0,:,:2] = 1
print(X)
conv = nn.Conv2d(1,1,kernel_size=2,bias=False)
print( conv )
with torch.no_grad():
conv.weight.copy_(torch.tensor([[-1.,1.],
[-1.,1.]]))
print( conv.weight )
print( conv.bias )
print( conv(X) )
tensor([[[[1., 1., 0., 0.],
[1., 1., 0., 0.],
[1., 1., 0., 0.]]]])
Conv2d(1,1,kernel_size=(2,2),stride=(1,1))
# задаём ядро фильтра
tensor([[[[-1.,1.],
[-1.,1.]]]],requires_grad=True)
None
tensor([[[[ 0., -2., 0.],
[ 0., -2., 0.]]]],
grad_fn=<ThnnConv2D>)
RNN
✒ nn.RNN… (input_size, hidden_size, num_layers=1, nonlinearity='tanh', bias=True,
… batch_first=False, dropout=0, bidirectional=False) [doc]
Базовый рекуррентный слой по входу $\mathbf{x}^{(t)}$ и предыдущему скрытому состоянию $\mathbf{h}^{(t-1)}$ вычисляется новое скрытое состояние $\mathbf{h}^{(t)}$ : $$ \mathbf{h}^{(t)} = \tanh(\mathbf{x}^{(t)}\,\mathbf{W}_{ih} + \mathbf{b}_{ih} + \mathbf{h}^{(t-1)}\,\mathbf{W}_{hh} + \mathbf{b}_{hh}) $$
Обязательные параметры: input_size - размерность входов ($\mathbf{x}$) и hidden_size - размерность выхода ( = скрытого состояния $\mathbf{h}$).
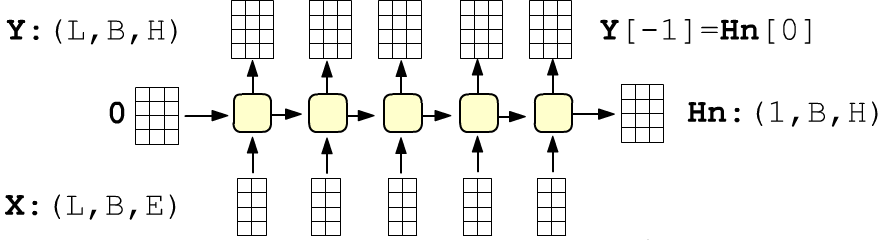
По умолчанию размерность входа (seq_len, batch_size, input_size), где seq_len - число RNN-ячеек (входов). Индекс батча можно сделать первым при помощи параметра batch_first. Впрочем тензор по умолчанию получается, если перед слоем RNN находится слой Embedding c seq_len входами и с input_size = VEC_DIM размерностью векторов.
Слой возвращает кортеж из тензора всех выходов сети формы (seq_len, batch_size, hidden_size) и последнего скрытого состояния (последний выход) формы (num_layers, batch_size, hidden_size), где для одного слоя num_layers = 1. По умолчанию компоненты начального скрытого состояние нулевые. Иначе их можно передать вторым аргументом:
X_dim = 2 # размерность входов = dim(x) H_dim = 4 # размерность скрытого состояния = dim(h) L = 3 # число входов (ячеек RNN слоя) B = 1 # число примеров (batch_size) rnn = nn.RNN(X_dim, H_dim) X = torch.zeros(L, B, X_dim) H0 = torch.zeros(1, B, H_dim) Y, Hn = rnn(X, H0) # H0 не обязательно, по умолчанию и так 0 print(tuple(Y.shape), tuple(Hn.shape)) # (3, 1, 4) (1, 1, 4) print(Y[-1] == Hn[-1]) # tensor([[[True, True, True, True]]])
В слое можно сразу задать стопку RNN-слоёв (num_layers) Между слоями можно вставить режим случайного забивания нулями выходов с вероятностью dropout. Слой можно также превратить в двунаправленный: bidirectional = True. В этом случае размерность выхода будет (inputs, batch_size, 2*hidden_size), а размерность начального скрытого состояния (2 * num_layers, batch_size, hidden_size).
LSTM
✒ torch.nn.LSTM… (input_size, hidden_size, num_layers=1, nonlinearity='tanh', bias=True,
… batch_first=False, dropout=0, bidirectional=False) [doc]
Аналогичен RNN. Подробности см. в NN_RNN.html. Кроме скрытого состояния $\mathbf{h}$ имеет память ячеек $\mathbf{c}$, см. документацию.
rnn = nn.LSTM(10, 20, 2) ... output, (hn, cn) = rnn(input, (h0, c0))
MultiheadAttention
✒ nn.MultiheadAttention… (embed_dim, num_heads, dropout=0.0, bias=True, add_bias_kv=False,
… add_zero_attn=False, kdim=None, vdim=None)
$$ \text{MultiHead}(\mathbf{Q},\mathbf{K}, \mathbf{V}) = \text{Concat}(\text{h}_1,\dots,\text{h}_H)\,\mathbf{W}^O, ~~~~~~~ \text{h}_i = \text{Attn}(\mathbf{Q}\,\mathbf{W}_i^Q,~ \mathbf{K}\,\mathbf{W}_i^K,~ \mathbf{V}\,\mathbf{W}_i^V) $$
Inputs: Q:(L,N,E), K,V:(S,N,E),
где
L - длина последовательности target (для декодера),
N - размер батча,
E - размерность эмбединга (embed_dim),
S - длина последовательности source.
Outputs: output: (L,N,E), weights: (N,L,S)
Размерности матриц: $\mathbf{W}^Q:$ (E, E),
$\mathbf{W}^K:$ (E, kdim),
$\mathbf{W}^V:$ (E, vdim),
где kdim,vdim задаются или равны E,
но они передаются в функцию linear, поэтому при умножении транспонируются.
Размерность каждой головы равны head_dim = E // num_heads.
Выходная матрица $\mathbf{W}^O:$ это слой Linear(E, E, bias=bias).
Если bias есть, он добавляется после умножения
на проекционные матрицы $\mathbf{W}^Q,\mathbf{W}^K,\mathbf{W}^V$ (к каждой свой).
Если эмбединг входов одинаковый, то проекционные матрицы упакованы в in_proj_weight формы (3*E,E), иначе это параметры: q_proj_weight, k_proj_weight, v_proj_weight. Смещение (если он есть) это in_proj_bias формы (3*E,), а выходной слой: out_proj.
Концептуально происходят следующие вычисления (N - размер батча, подробности см. в NN_Attention.html):
q = linear(Q, q_proj_weight, in_proj_bias[0 : E]) # (L,N,E) @ (E, E).T = (L,N,E) k = linear(K, k_proj_weight, in_proj_bias[E : E*2]) # (S,N,E) @ (E, kdim).T = (S,N,kdim) v = linear(V, v_proj_weight, in_proj_bias[E*2:]) # (S,N,E) @ (E, vdim).T = (S,N,vdim) q = q.contiguous().view( L, N * num_heads, head_dim).transpose(0,1) k = k.contiguous().view(-1, N * num_heads, head_dim).transpose(0,1) v = v.contiguous().view(-1, N * num_heads, head_dim).transpose(0,1) a_weights = torch.bmm(q, k.transpose(1,2)) a_weights = softmax(a_weights, dim=-1) a = torch.bmm(a_weights, v) a = a.transpose(0, 1).contiguous().view(L, N, E) a = linear(a, out_proj_weight, out_proj_bias)
TransformerEncoderLayer
✒ nn.TransformerEncoderLayer… (d_model, nhead, dim_feedforward=2048, dropout=0.1, activation='relu')
Параметры: d_model – размерность входа (вектора одного токена), nhead – число голов (делитель параметра d_model), dim_feedforward – размерность полносвязной сети.
TransformerEncoder
✒ nn.TransformerEncoder… (encoder_layer, num_layers, norm=None)
L, N, E = 10, 32, 512 # число слов, размер батча, размерность эмбединга encoder_layer = nn.TransformerEncoderLayer(d_model=E, nhead=8) transformer_encoder = nn.TransformerEncoder (encoder_layer, num_layers=6) src = torch.rand(L, N, E) out = transformer_encoder(src) # out.shape == src.shape
Cлои без параметров
Лиаринизация тензора
✒ nn.Flatten(start_dim=1, end_dim=-1)При создании с параметрами по умолчанию, все индексы кроме первого (индекс примера) сольются в один (для каждого примера получится вектор). Слой параметров не имеет.
X = torch.ones(2, 5,4,3) Y = torch.nn.Flatten()(X) print( tuple(Y.shape) ) # (2, 60)
Косинус между векторами
✒ nn.CosineSimilarity(dim=1, eps=1e-08)$$ \frac{\mathbf{u}\mathbf{v}}{ \max( |\mathbf{u}|\,|\mathbf{v}|,~~\epsilon) } $$
Input1, Input2: (*, D, *), где D - размерность вектора и формы одинаковые. Output: (*,*).Ниже косинус вычисляется между строчками матриц:
u, v = torch.randn(100, 128), torch.randn(100, 128) output = nn.CosineSimilarity(dim=1, eps=1e-6) (u, v)
Расстояние между векторами
✒ nn.PairwiseDistance(p=2.0, eps=1e-06, keepdim=False)$$ \bigr(\sum_{i} |x_i|^p \Bigr)^{1/p} $$
Input1, Input2: (N, D), где D - размерность вектора. Output: (N) или (N, 1), если keepdim = True.Отключение нейронов
✒ nn.Dropout(p=0.5, inplace=False)
В режиме тренировке: m.train(), с вероятностью "p" зануляет каждый элемент
матрицы и делит их на 1-p.
В режиме оценивания: m.eval() ничего не делает.
Благодаря делению на 1-p среднее значение по модулю элементов в режиме тренировки будет
такой-же, как и врежиме оценивания (у входного тензора).
m = nn.Dropout(p = 0.2)
# v v
print( m(torch.ones(10)) ) # [1.25, 1.25, 1.25, 0.0, 1.25, 1.25, 1.25, 0.0, 1.25, 1.25]
x = torch.randn(100, 100)
m.eval() # This is equivalent with self.train(False)
y = m(x)
print( (x==y).float().mean() ) # не меняется
m.train()
y =m(x)
print(x.abs().mean(), (x*x < 1e-10).float().mean() ) # 0.8025 0.
print(y.abs().mean(), (y*y < 1e-10).float().mean() ) # 0.8001 0.206
Нормализация тензора
✒ nn.BatchNorm1d(num_features, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)По батчу (перый индекс) вычисляются средние значения и дисперсии по каждому признаку независимо. Затем делается нормализаци данных и афинный сдвиг с обучаемыми параметрами $\gamma,\,\beta$. $$ y = \frac{x - \mathrm{E}[x]}{\sqrt{\mathrm{Var}[x] + \epsilon}} \odot \text{weight} + \text{bias} $$ Вход должен быть тензором формы (N,F) или (N,F,L). Параметр num_features = F. Для тензора (N,F,L) усреднение происходит для dim=0,2, т.е. одинаковые средние по каждому "входу" последнего индекса [0...L-1].
В процессе тренировки средние значения сглаживаются скользящим средним с параметром momentum (если None - то обычное среднее). Эти средние запоминаются и затем используются при тестировании (даже с одним батчем).
m = nn.BatchNorm1d(2)
x = torch.randn(100000,2)
print( x.mean(dim=0), x.var(dim=0) ) # [-0.0005, 0.0067] [1.0058, 0.9956]
x = 2 * x + 3
print( x.mean(dim=0), x.var(dim=0) ) # [ 3.0010, 2.9867] [4.0231, 3.9824]
y = m(x)
with torch.no_grad():
print(y.mean(dim=0), y.var(dim=0)) # [ 0.0000, 0.0000] [1.0000, 1.0000]
for k, v in m.state_dict().items(): # weight :(2,)
print(f'{k:20s}: {tuple(v.shape)}') # bias :(2,)
# running_mean :(2,)
# running_var :(2,)
# num_batches_tracked:( )
MaxPool2d
✒ nn.MaxPool2d(kernel_size, stride=None, padding=0, dilation=1, return_indices=False, ceil_mode=False)
AvgPool2d
✒ nn.AvgPool2d(kernel_size, stride=None, padding=0, ceil_mode=False, count_include_pad=True, divisor_override=None)
Активационные функции
Сигмоид: $\mathrm{Sigmoid}(x) = 1/(1+e^{-x})$
✒ nn.Sigmoid() [doc]
✒ F.sigmoid(x)
Tanh: $\mathrm{Tanh}(x) = (e^{x}-e^{-x})/(e^{x}+e^{-x})$
✒ nn.Tanh() [doc]
✒ F.tanh(x)
ReLU: $\mathrm{Sigmoid}(x) = \max(0,x)$
✒ nn.ReLU(inplace=False) [doc]
✒ F.relu(x, inplace=False)
ELU: $\mathrm{ELU}(x) = \max(0,x) + \min(0, \alpha\,(e^{x}-1))$
✒ nn.ELU(alpha=1.0, inplace=False) [doc]
✒ nn.elu(x, alpha=1.0, inplace=False)
Софтмакс: $\mathrm{Softmax}(x_i) = e^{x_i}/\sum_j e^{x_j}$
✒ nn.Softmax(dim=None) [doc].
✒ F.softmax(x, dim)
X = torch.tensor( [ [1.,2.,3] ] ) torch.nn.Softmax(dim=1)(X) # tensor([[0.09, 0.24, 0.66]])
Логарифмический софтмакс: $\mathrm{LogSoftmax}(x_i) = \log \bigr(e^{x_i}/\sum_j e^{x_j}\bigr)$
✒ nn.LogSoftmax (dim=None) [doc].
Функции ошибки
Среднеквадратичная ошибка
✒ nn.MSELoss
… (size_average=None, reduce=None, reduction='mean')
[doc]
$$
L(y,\hat{y}) = (y - \hat{y})^2
\left\{
\begin{array}{ll}
.\mathrm{mean}() & \text{if reduction='mean'}\\
.\mathrm{sum}() & \text{if reduction='sum'}
\end{array}
\right.
$$
По умолчанию (reduction='mean') квадраты отклонений усредняются по всем примерам батча и по всем выходам (ошибка это скаляр!).
loss = torch.nn.MSELoss() y = torch.rand(10, 2) # 10 примеров, 2 выхода yb = torch.rand(10, 2) loss(y, yb) == ((y-yb)**2).mean()
Бинарная кросс-энтропия
✒ nn.BCELoss… (weight=None, size_average=None, reduce=None, reduction='mean') [doc]
Предполагается, что эта ошибка ставится после сигмоидной активации, т.е. выходы модели y и целевые значения yb находятся в диапазоне [0...1]. Обычно BCELoss используется для сети с одним выходом (задача для двух классов 0 и 1). Если классы пересекаются (т.е. пример может относится сразу к нескольким классам), то число выходов равно числу классов. По умолчанию (reduction='mean') ошибки усредняются по всем примерам и всем выходам:
loss = torch.nn.BCELoss() y = torch.rand(10, 2, 3) # 10 примеров, 2x3 выходов yb = torch.rand(10, 2, 3) print( loss(y, yb) ) print( -( yb*y.log() + (1-yb)*(1-y).log() ).mean() )Вектор weight с числом компонент равных числу примеров в батче может по-разному взвешивать различные примеры. Ошибка для $i$-го примера ($y$ - выход модели, $\hat{y}$ - целевое значение): $$ L_i = -w_i\,\bigr[ \hat{y}_i\,\log y_i + (1-\hat{y}_i)\,\log (1-y_i)\bigr] $$
Кросс-энтропия
✒ nn.CrossEntropyLoss… (weight=None,size_average=None,ignore_index=-100,reduce=None,reduction='mean') [doc]
Применяется к задаче классификации не пересекающихся $C$ классов. Сеть должна иметь $C$ выходов, т.е. в ошибку из модели входит тензор $y_{i\alpha}$ формы $(N,C)$, где $N$ - размер батча. Целевыми являются целые числа $\hat{y}_i \in [0...C-1]$ - номера классов каждого примера формы (N,). Ошибка для одного $i$-того примера и $\hat{y}_i=c$ равна:
$$ L(y, c) = -\,w_c\,\log\left( \frac{\exp {y_{ic}}}{ \sum_\alpha \exp{y_{i\alpha}}}\right). $$ Веса $w_\alpha$ (по числу классов) могут усиливать вклад отдельных классов. Таким образом, CrossEntropyLoss совмещает в себе Softmax и на выходе сети его ставить не нужно. $C$ выходов сети $y_{i\alpha}$ превращаются в "вероятности" и максимизируется логарифм вероятности правильного класса $\hat{y}_i=c$ (знак минус - ошибка минимальна). Итоговая ошибка равна среднему $L(y, c)$ по всем примерам батча (если reduction='mean').Входные данные в функцию ошибки CE_loss(y, y_t)могут иметь форму y=(B,C):float, y_t=(B,):long или в n-мерном случае: y=(B,C,L1,...,Ln):float, y_t=(B,L1,...,Ln):long
B, C, L = 10, 5, 4 # примеров, классов, выходов w = torch.rand(C) # веса важности классов CE_loss = nn.CrossEntropyLoss(weight=w, ignore_index=1) y = torch.randn(B, C, L) yb = torch.empty(B, L, dtype=torch.long).random_(C) loss = CE_loss(y, yb) print(loss) # ошибкаВоспроизведём, полученное значение:
y = -nn.Softmax(dim=1)(y).log() # минус логарифма от софтмакса
loss, norm = 0, 0
for b in range(B):
for l in range(L):
c = yb[b,l] # правильный класс
if c != 1: # игнорируем класс 1
loss += w[c]*y[b, c, l] # ошибка
norm += w[c] # нормировка
print(loss/norm)
Логарифмический максимум правдоподобности
✒ nn.NLLLoss… (weight=None, size_average=None, ignore_index=-100, reduce=None, reduction='mean') [doc]
Результат будет таким же как и при CrossEntropyLoss, если последним слоем стоит LogSoftmax.
Оптимизаторы
torch.optim.Adam(params, lr=0.001, betas=(0.9, 0.999),
eps=1e-08, weight_decay=0, amsgrad=False)
torch.optim.Adagrad(params, lr=0.01, lr_decay=0, weight_decay=0,
initial_accumulator_value=0, eps=1e-10)
torch.optim.Adadelta(params, lr=1.0, rho=0.9, eps=1e-06, weight_decay=0)
torch.optim.RMSprop(params, lr=0.01, alpha=0.99, weight_decay=0, momentum=0,
eps=1e-08, centered=False)
torch.optim.Rprop(params, lr=0.01, etas=(0.5, 1.2), step_sizes=(1e-06, 50))
torch.optim.SGD(params, lr, momentum=0,
dampening=0, weight_decay=0, nesterov=False)
