Застосування нейронних мереж тестують для повернення зразків ґрунту з поверхні Марса
Як відомо, марсохід NASA Perseverance продовжує свою місію на Марсі. Він досліджує ландшафт планети, оцінює її природні ресурси та, серед іншого, збирає проби марсіанських гірських порід та атмосфери.
Perseverance оснащений системою збору та зберігання зразків ґрунту, яка використовує технологію ударно-обертального буріння. На кінці двометрової роботизованої руки ровера знаходиться ротаційно-ударне свердло та порожниста свердловина для одночасного буріння поверхні та забору зразків. Також на Perseverance встановлено 43 титанові пробірки, призначені для зберігання зразків. П'ять із них залишаться незаповненими для контролю чистоти проб.
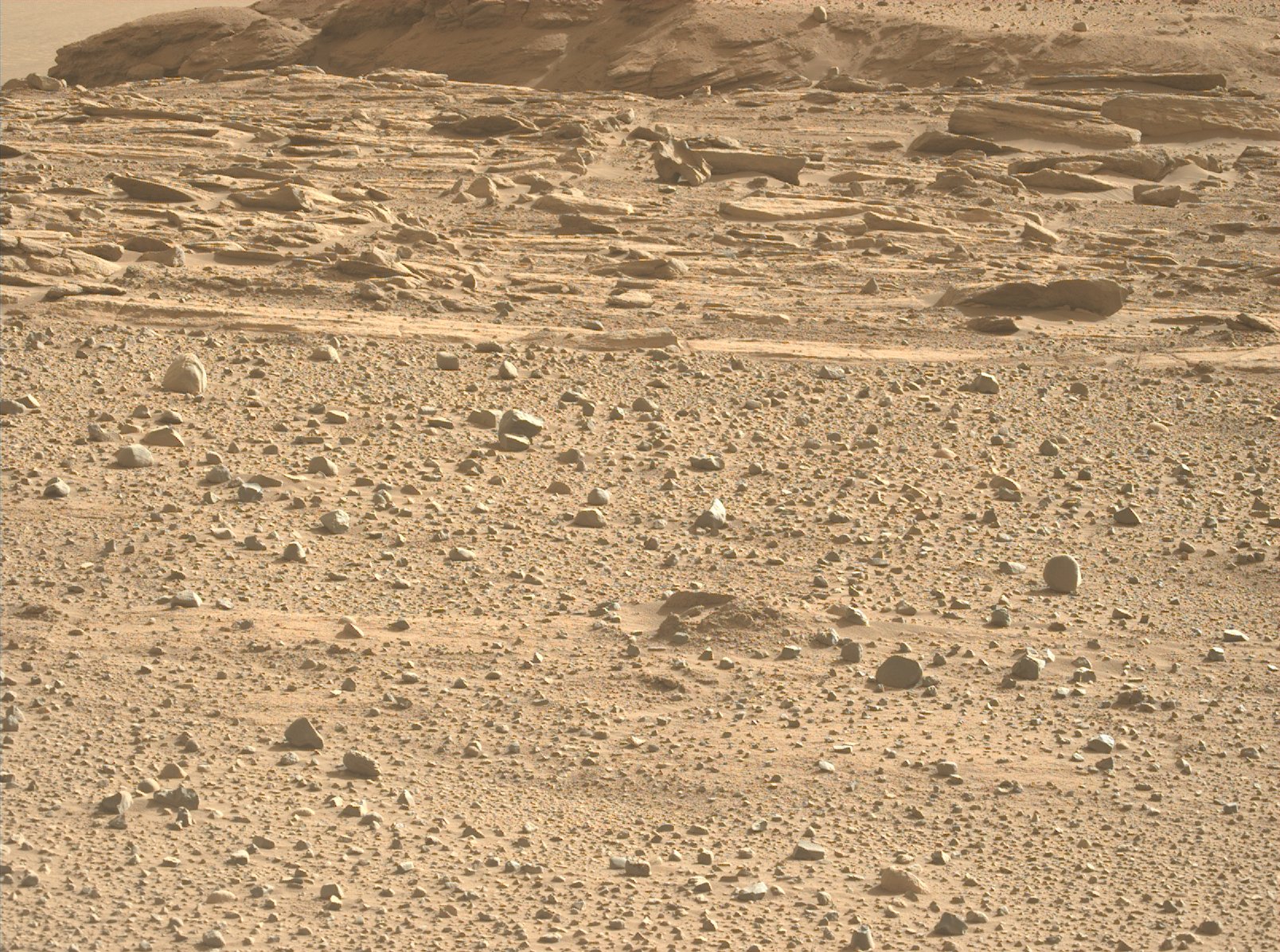
Збір зразків ґрунту проходить у кратері Езеро на Марсі. Мільярди років тому на цьому місці було озеро. У кратер впадала річка. Вона приносила осад і утворила круту віялоподібну дельту. Припускається, що із відкладень порід тут можна буде отримати цінну інформацію про давню біологію Марса.
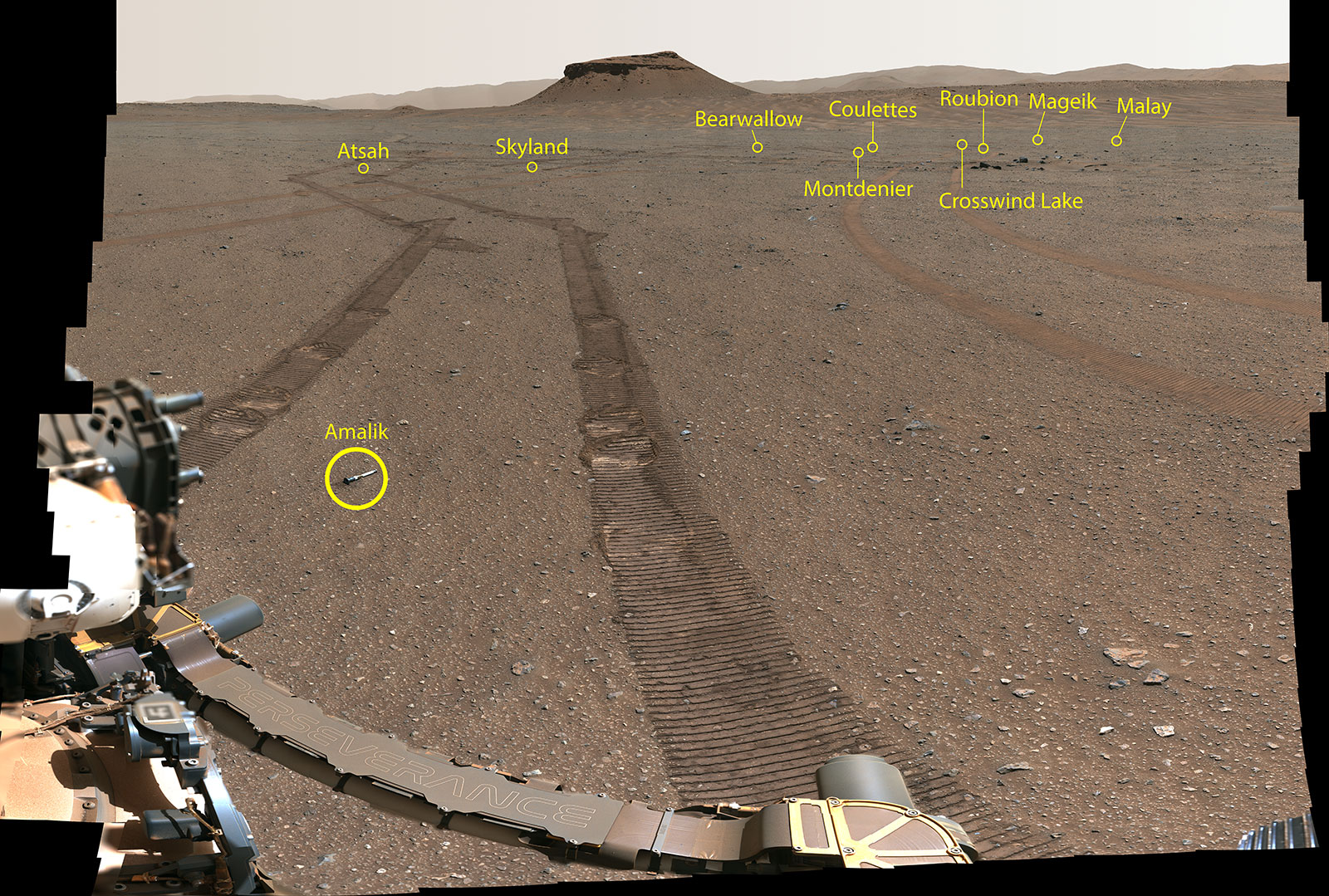
Perseverance просвердлює вибраний зразок, вилучає з нього матеріал, поміщає пробу у контейнер і герметично запаковує. Марсохід збирає по два зразки кожної породи. Ідея полягає в тому, щоб залишати один із зразків на борту, а другий – скинути для зберігання в спеціальних місцях на ділянці Three Forks всередині кратера Езеро. Це буде резервне сховище на випадок, якщо з марсоходом щось трапиться, і він не зможе доставити контейнери.
Сам контейнер для зразків це спеціальна герметична пробірка з титану довжиною 15,24 см (6 дюймів). На вилучення кожного контейнера з надр Perseverance потрібно більше години, потім марсохід обережно скидає контейнер у зону зберігання зразків на Марсі.

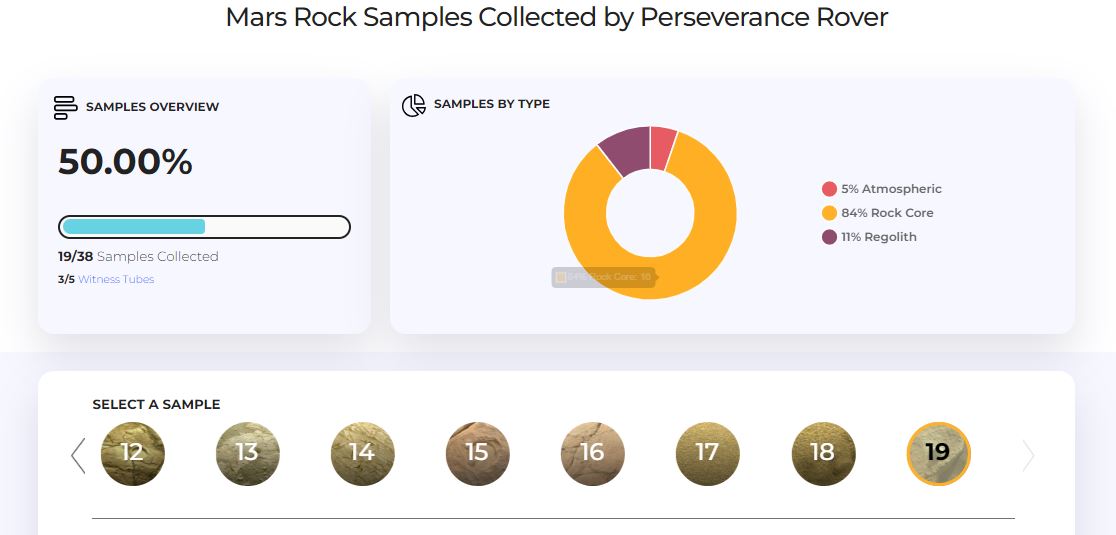
NASA має окремий сайт для колекції зразків, де відображається процес збору матеріалів і зазначено всі подробиці про кожен із зразків.
Координати кожної точки скидання фіксуються, щоб Perseverance міг повернутися до них знову, якщо потрібно. Зразки зберігаються на відкритій місцевості в деякому віддаленні один від одного. Точки розміщення спеціально були обрані так, щоб їх зручно було забрати роботизованою рукою марсохода або майбутньою місією, ймовірно вертольотами, у разі поломки марсохода.
Вважається, що повернення зразків з Марсу на Землю це найскладніша кампанія роботизованого космічного польоту з будь-яких вже реалізованих. Марсохід Sample Fetch Rover розроблявся як спільна місія Європейського космічного агентства та Роскосмосу. Однак вторгнення Росії в Україну призвело до скасування цієї програми. Європейське космічне агентство (ESA) відмовилося запускати проєкт на ракеті "Союз". Місію припинено. Однак технологія, що стоїть за нею, залишається ключовою для кампанії з повернення зразків з Марсу.
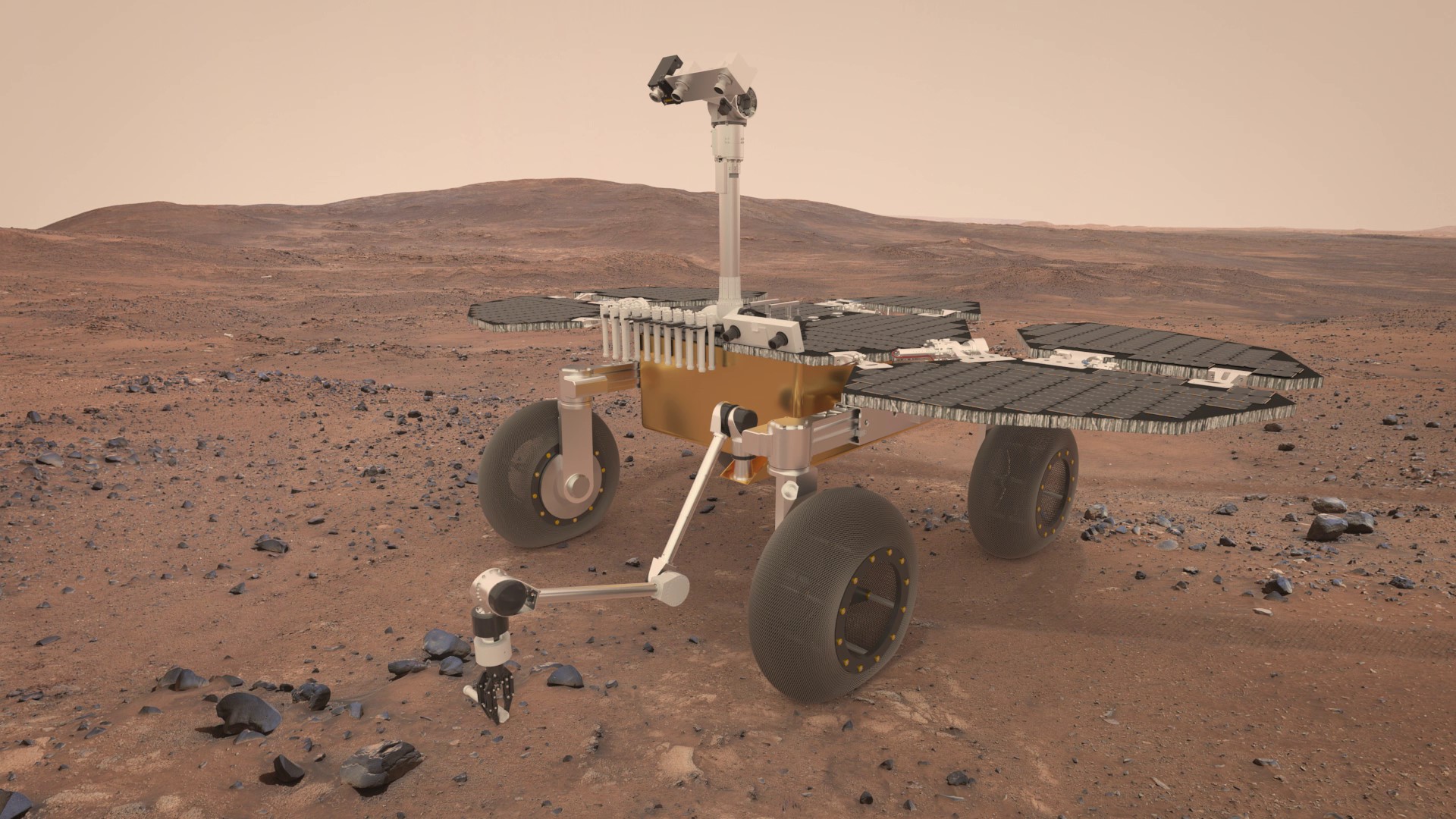
Лаура Білленберг, стажер-випускник ESA, працює над випробувальним стендом під назвою Rabbit (внутрішній випробувальний стенд RAS Bread Boarding). Тут відтворюється точна система збору, яка мала стати частиною марсоходу ESA Sample Fetch Rover. Рукав для перенесення зразків, як і раніше, необхідний для завантаження титанових пробірок з марсіанської поверхні та доставки їх на Землю. Роботизована рука ESA збере їх з марсохода Perseverance і, можливо, з вертольотів для збирання зразків як резервну копію.
Роботи проводяться на випробувальному полігоні Mars Yard. Він є частиною Лабораторії планетарної робототехніки ESA та знаходиться в технічному центрі ESA ESTEC у Нордвейку, Нідерланди. Тут із точністю відтворено марсіанський кам'янистий ландшафт.

Лаура залишає копії титанових трубок для зразків на поверхні полігону неподалік металевої конструкції з роботизованою рукою та досліджує стратегії їх збору, від автономного виявлення до оцінки положення пробірок із зразками на Марсі.
Для виявлення трубок та оцінки їх положення і орієнтації, команда вчених використовує не лише камери та датчики, а й нейронні мережі. Алгоритм роботи нейронної мережі був розроблений спільно з Katholieke Universiteit Leuven у Бельгії.
Стенд для збирання трубок оснащений навігаційною камерою, встановленою на вершині конструкції. Нейронна мережа отримує зображення з цієї камери та здійснює пошук титанових трубок на них. Вона також ідентифікує точки на зображенні, щоб оцінити положення трубки на поверхні.

Команда спробувала відтворити марсіанське середовище, імітуючи схоже освітлення та ландшафт. Було спроектовано суміш прямого та непрямого освітлення, створено імітацію різних типів місцевості шляхом комбінації піску, гальки та каміння. Всі ці дії були здійснені для підвищення якості навчання нейронних мереж.
Мета місії – доставити зразки з Марсу на Землю. Відомості, отримані з них, та технології, розроблені в рамках програм дослідження Марса, дозволять людству одного дня розгадати таємниці Червоної планети.