Політ наосліп: як керувати дроном у повній темряві
Зі стрімко зростаючою тенденцією до використання автономних дронів у логістиці, промисловості та роботі екстрених служб зростає і потреба у навігації в умовах, де GPS недоступний. Супутникова навігація ефективна на відкритій місцевості, проте вона не працює в закритих приміщеннях, підземних спорудах, густонаселених міських районах і зонах стихійних лих. Останні дослідження та галузеві інновації, зокрема кейс від QuData про автономну навігацію дронів без GPS-сигналу, змінюють принципи роботи безпілотників, не покладаючись на супутникові сигнали.
Безпілотні літальні апарати (БПЛА), які здійснюють навігацію без GPS, використовують альтернативні методи локалізації, такі як візуальна одометрія, LiDAR-системи та сенсорний аналіз. Інтегруючи дані із камер, інерційних вимірювальних пристроїв (IMU), барометрів і радіолокаційних систем, дрони створюють точні карти середовища та стабільно рухаються в просторі.
Але хоч системи комп’ютерного зору та LiDAR і використовуються для навігації в приміщеннях, їм важко працювати в умовах слабкого освітлення або в однотипних приміщеннях. Щоб подолати ці обмеження, команда з Массачусетського технологічного інституту представила MiFly – систему, яка використовує радіочастотні (РЧ) хвилі та сигнали зворотного розсіювання для забезпечення точної локалізації з мінімальними вимогами до обладнання.
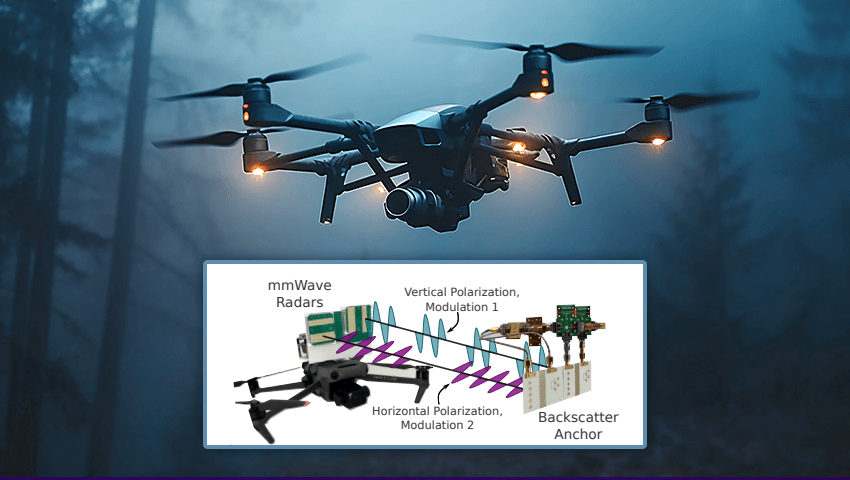
MiFly працює за допомогою однієї малопотужної мітки, яка відбиває сигнали міліметрового діапазону, що передаються бортовим радаром дрона. На відміну від традиційних систем, які потребують декількох маркерів або складної інфраструктури, підхід MiFly є економічно ефективнішим і простішим у впровадженні. Дрон виявляє відбиття від мітки, відфільтровуючи шум навколишнього середовища за допомогою методу модуляції, який призначає унікальні частоти, щоб відрізнити відгук мітки від інших віддзеркалень.
Щоб забезпечити точне позиціонування, розробники встановили на дрон два радари – горизонтальний і вертикальний. Кожен радар передає сигнали з різною поляризацією, що дозволяє мітці розрізняти їх і відбивати відповідно. Цей метод подвійної поляризації допомагає визначати просторове положення дрона навіть у закритих приміщеннях із мінімальними візуальними орієнтирами. Дані з цих радарів потім об’єднуються з даними бортового IMU, який відстежує прискорення, висоту та орієнтацію дрона. Ця інтеграція дозволяє БПЛА оцінити повну траєкторію польоту, включаючи обертання, рух і нахил.
Під час тестових польотів у різних закритих просторах, зокрема в затемнених тунелях, MiFly продемонстрував вражаючу точність локалізації до 7 сантиметрів. Навіть у разі часткового перекриття мітки система залишалася стабільною в межах 6 метрів. Дослідники планують покращити дальність роботи, удосконаливши дизайн радарів та антен.
Окрім автоматизації для складів, ця технологія має широкий спектр застосувань: від рятувальних операцій та інспекції небезпечних зон до військових операцій. Безпілотники, оснащені навігацією без GPS, можуть знаходити людей під завалами чи обстежувати підземні об’єкти. Крім того, ці дрони є ідеальним рішенням для ретрансляції зв’язку у віддалених або важкодоступних місцях.
Подальший етап розвитку MiFly – інтеграція з повністю автономними системами, які дозволять дронам самостійно прокладати маршрути, орієнтуючись лише на РЧ локалізацію. Оскільки індустрія все більше покладається на безпілотники для вирішення критично важливих завдань, такі інновації, як MiFly, стануть ключовими для забезпечення безперебійної та ефективної роботи навіть у найскладніших умовах.
Дізнайтеся більше технічних деталей про цей підхід до навігації дронів у статті про MiFly.