Autonomous Drone Navigation Without GPS
The QuData team has developed an autonomous drone navigation platform that integrates visual odometry, inertial sensors, and ultrasonic navigation (Multipoint LiDAR). The system ensures stable flight control and precise positioning without any reliance on GPS. Our solution is designed for industrial environments and operations in confined or GPS-denied spaces.

 Business Challenge
Business Challenge
Nowadays drones widely use GPS for navigation and flight stabilization. However, in indoor environments or areas with poor GPS signals, their use is limited. When GPS is unavailable or unreliable, drones lose their primary advantages: accuracy, reliability, and safety.
This is particularly critical for industries such as emergency response, mining, oil and gas, and energy, where drones can perform essential tasks in confined or hard-to-reach spaces. The need for drones capable of operating independently of GPS is increasingly evident and demands innovative solutions.
 Solution Overview
Solution Overview
In response to the challenge of GPS absence, an integrated platform has been developed that includes both hardware and software components to create autonomous drones.
One of the proposed solutions is the QuDrone platform, integrating artificial intelligence (AI) and machine learning (ML) to control unmanned aerial vehicles (UAVs) in the absence of GPS signals.
The platform utilizes the cross-platform simulator AirSim, based on the Unreal Engine game engine. AirSim allows for the creation and testing of drone control algorithms in a virtual environment, simulating various flight scenarios and conditions. The platform supports the development and testing of algorithms for visual odometry, search, classification, and object detection on the ground using emulated sensors and visual imaging elements.
Additionally, for the hardware part, a platform based on the Raspberry Pi microcomputer was chosen, providing compactness and performance for real-time operation. This solution supports a wide range of peripherals and different architectures necessary for integrating and testing various systems.
 Technical Details
Technical Details
The use of visual odometry and Simultaneous Localization and Mapping (SLAM) enables the drone to determine its location and navigate using data from cameras and other sensors. This technology provides autonomous navigation even in the complete absence of GPS signals.
Inertial measurement units (IMUs), including accelerometers and gyroscopes, help drones maintain stability and navigate based on acceleration and angular velocity data. This is especially important in environments requiring high precision in maneuvering and positioning.
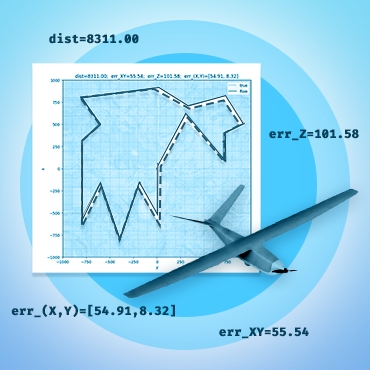
The main errors occur when flying over surfaces with few visual landmarks for motion identification, such as lakes, rivers, etc. When flying at low altitudes (up to 50 meters), certain issues are also created by elevation changes and tall objects (uncertainty in distance to the ground in the absence of a rangefinder). Increasing the flight altitude reduces the impact of these factors.
Navigating drones without reliance on GPS signals is a critical advancement for industries that operate in GPS-limited environments. The integration of visual odometry, IMU, and ultrasonic navigation (Multipoint LiDAR) technologies enables UAVs to perform tasks safely and effectively where traditional navigation methods fail. This innovative approach is particularly valuable for emergency response, mining, oil and gas, and energy sectors, enhancing the reliability and efficiency of operations in challenging conditions. As the development and testing of these autonomous systems continue, the potential for their application in various professional fields becomes increasingly promising.
Technology Stack

OpenCV

C++

Python

BetaFlight
