Применение нейронных сетей тестируют для возврата образцов грунта с поверхности Марса
Как мы знаем, марсоход NASA Perseverance продолжает свою миссию на Марсе. Он исследует ландшафт планеты, оценивает его природные ресурсы и, среди прочего, собирает пробы марсианских горных пород и атмосферы.
Perseverance оснащен системой сбора и хранения образцов грунта, которая использует технологию ударно-вращательного бурения. На конце двухметровой роботизированной руки ровера находится ротационно-ударное сверло и полая скважина для одновременного бурения поверхности и забора образцов. Также на Perseverance установлено 43 титановых пробирки, предназначенные для хранения образцов. Пять из них останутся незаполненными для контроля чистоты проб.
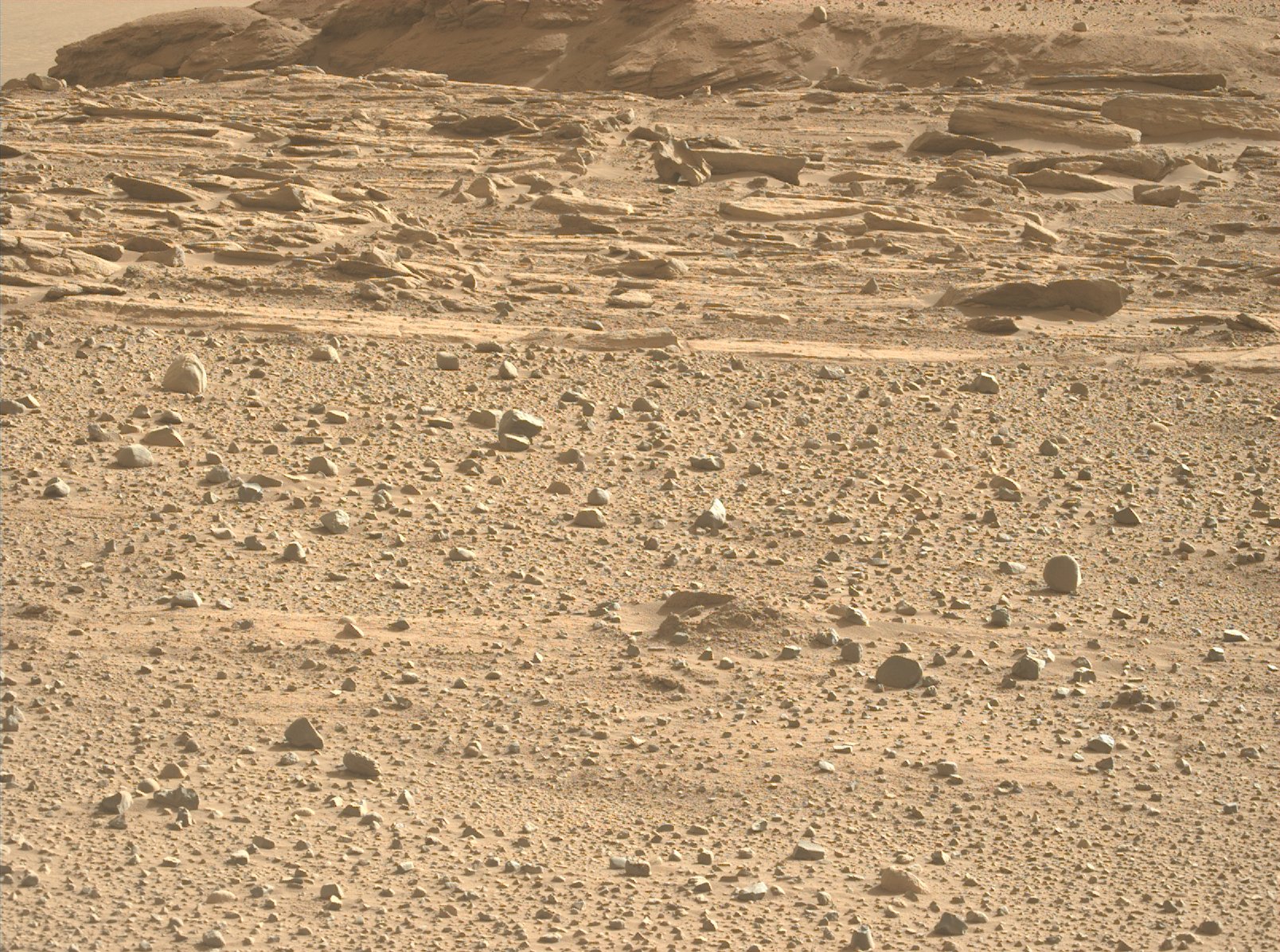
Сбор образцов грунта происходит в кратере Эзеро на Марсе. Миллиарды лет назад на этом месте было озеро. В кратер впадала река. Она приносила осадок и образовала крутую веерообразную дельту. Предполагается, что здесь из отложений пород можно будет извлечь ценную информацию о древней биологии Марса.
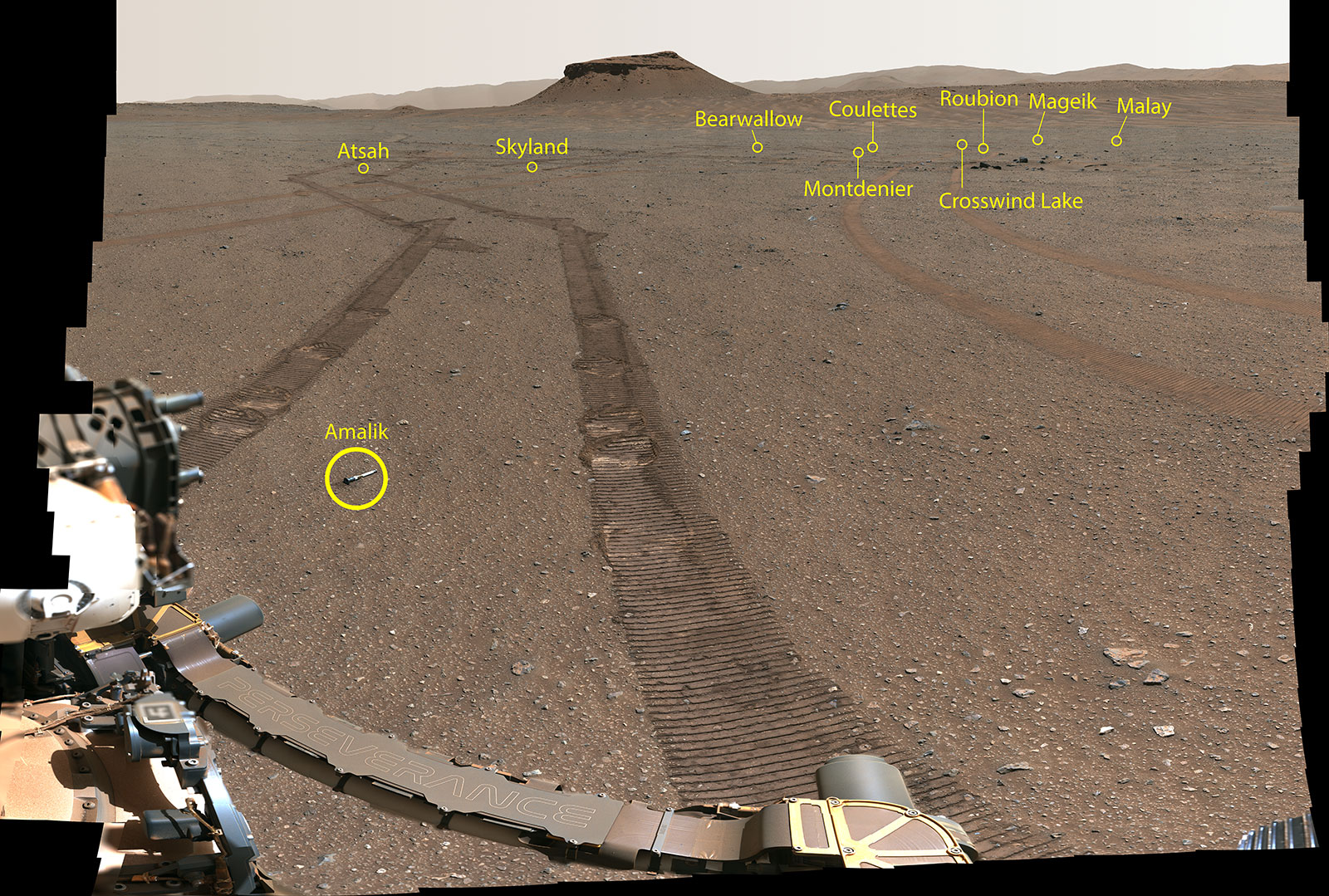
Perseverance просверливает выбранный образец, извлекает из него материал, помещает пробу в контейнер и герметично упаковывает. Марсоход собирает по два образца каждой породы. Идея заключается в том, чтобы оставлять один из образцов на борту, а второй – сбросить для хранения в специальных отмеченных местах на участке Three Forks внутри кратера Эзеро. Это будет резервное хранилище в случае, если с марсоходом что-то случится и он не сможет доставить контейнеры.
Сам контейнер для образцов – это специальная герметичная пробирка из титана длиной 15,24 см (6 дюймов). На извлечение каждого контейнера из недр Perseverance уходит больше часа, затем марсоход аккуратно сбрасывает контейнер в зону хранения образцов на Марсе.

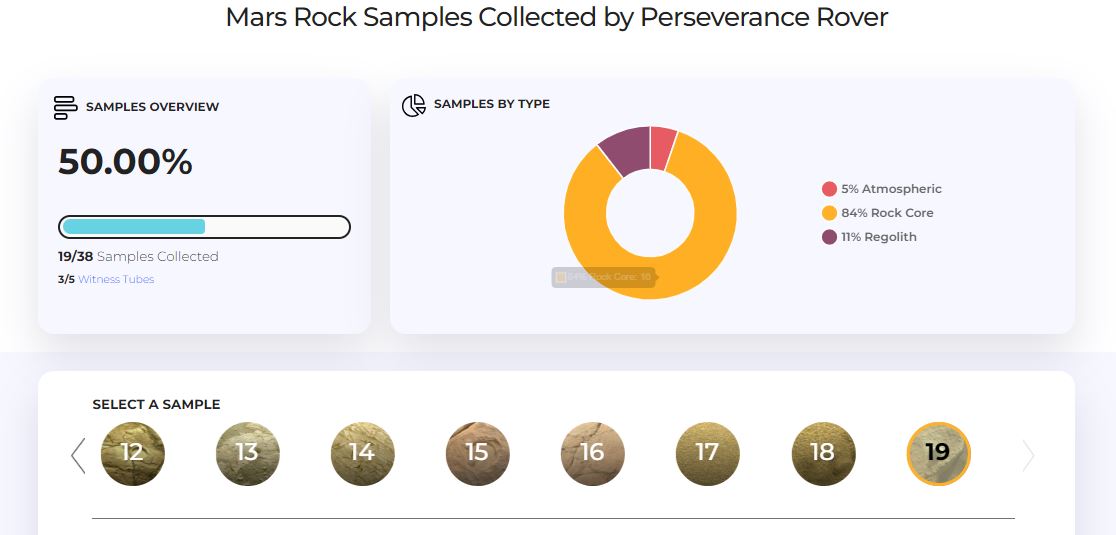
У NASA есть отдельный сайт для коллекции образцов, где отображается процесс сбора материалов и указано все подробности о каждом из образцов.
Координаты каждой точки сброса фиксируются, чтобы Perseverance мог вернуться к ним снова, если потребуется. Образцы хранятся на открытой местности в некотором отдалении друг от друга. Точки размещения специально были выбраны так, чтобы их удобно было забрать роботизированной рукой марсохода или будущей миссией, предположительно вертолетами, в случае поломки марсохода.
Считается, что возвращение образцов с Марса на Землю это самая сложная кампания роботизированного космического полета из когда-либо предпринятых. Марсоход Sample Fetch Rover разрабатывался как совместная миссия Европейского космического агентства и Роскосмоса. Однако вторжение России в Украину привело к отмене этой программы. Европейское космическое агентство (ESA) отказалось запускать проект на ракете «Союз». Миссия приостановлена. Тем не менее технология, стоящая за ней, остается ключевой для кампании по возврату образцов с Марса.
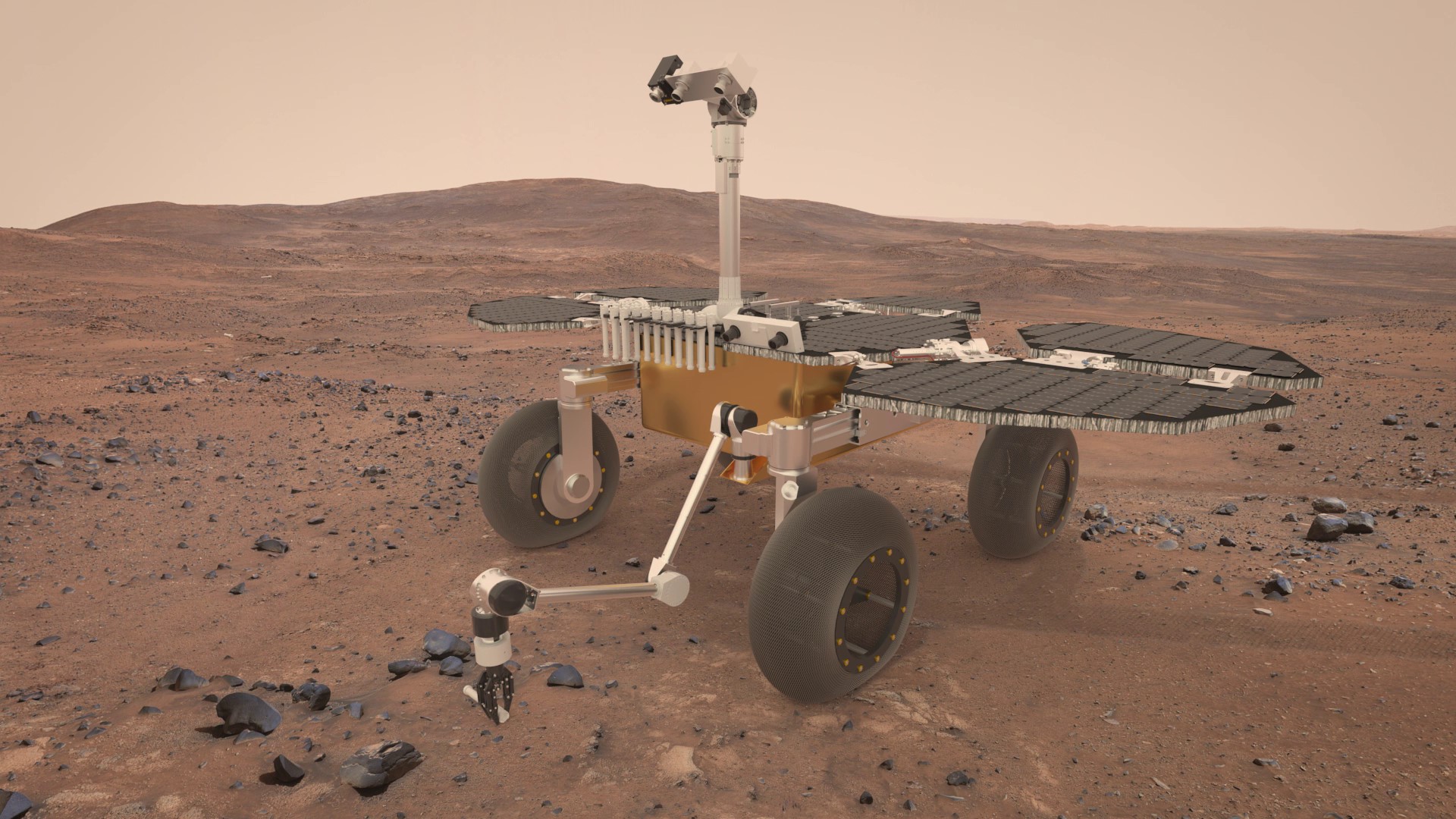
Лаура Биленберг, стажер-выпускник ESA, работает над испытательным стендом под названием Rabbit (внутренний испытательный стенд RAS Bread Boarding). Здесь воспроизводится точная система сбора, которая должна была стать частью марсохода ESA Sample Fetch Rover. Рукав для переноса образцов по-прежнему необходим для загрузки титановых пробирок с марсианской поверхности и доставки их на Землю. Роботизированная рука ESA соберет их с марсохода Perseverance и, возможно, с вертолетов для сбора образцов в качестве резервной копии.
Работы проводятся на испытательном полигоне Mars Yard. Он является частью Лаборатории планетарной робототехники ESA и находится в техническом центре ESA ESTEC в Нордвейке, Нидерланды. Здесь с точностью воссоздан марсианский каменистый ландшафт.

Лаура оставляет копии титановых трубок для образцов на поверхности полигона недалеко от металлической конструкции с роботизированной рукой и исследует стратегии их сбора, от автономного обнаружения до оценки положения пробирок с образцами на Марсе.
Для обнаружения трубок и оценки их положения и ориентации, команда ученых использует не только камеры и датчики, но и нейронные сети. Алгоритм работы нейронной сети был разработан совместно с Katholieke Universiteit Leuven в Бельгии.
Стенд для сбора трубок оснащен навигационной камерой, установленной на вершине конструкции. Нейронная сеть получает изображения с этой камеры и осуществляет поиск титановых трубок на них. Также она идентифицирует точки на изображении, чтобы оценить положение трубки на поверхности.

Команда попыталась воссоздать марсианскую среду, имитируя похожее освещение и ландшафт. Была спроектирована смесь прямого и непрямого освещения, создана имитация разных типов местности путем комбинации песка, гальки и камней. Все эти действия были предприняты для повышения качества обучения нейронных сетей.
Цель миссии – доставить образцы с Марса на Землю. Данные, полученные из них, и технологии, разработанные в рамках программ исследования Марса, позволят человечеству однажды разгадать тайны Красной планеты.