Application of Neural Networks tested for returning soil samples from the surface of Mars
As we know, NASA's Perseverance rover continues its mission on Mars. It explores the planet's landscape, assesses its natural resources, and collects samples of Martian rocks and atmosphere, among other tasks.
Perseverance is equipped with a system for collecting and storing soil samples, which uses rotary percussion drilling technology. At the end of the rover's 2m robotic arm is a rotary percussion drill and a hollow borehole for simultaneous surface drilling and sampling. Perseverance is also equipped with 43 titanium tubes designed to store the samples, with five of them remaining empty for purity control purposes.
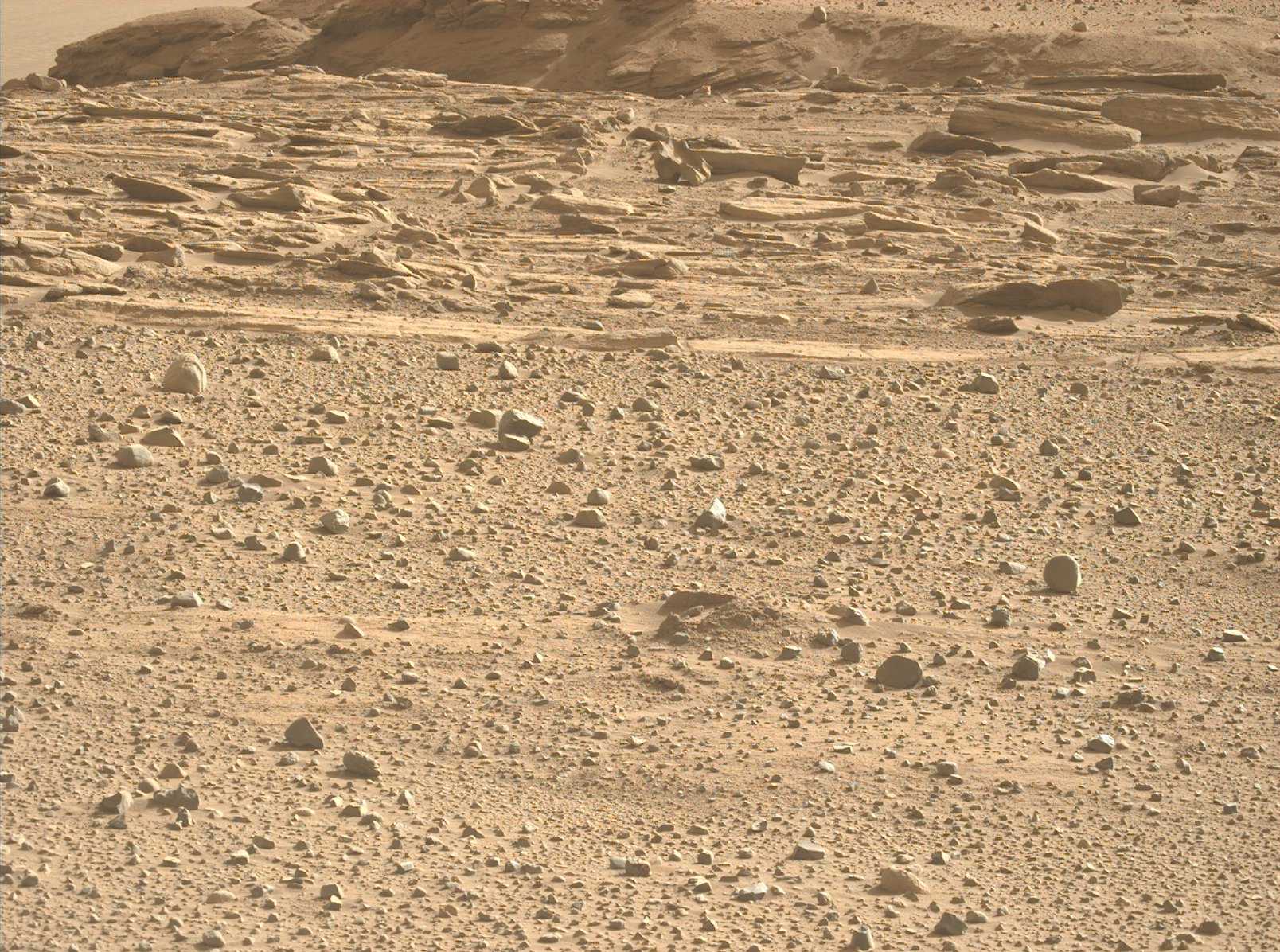
The collection of soil samples takes place in the Jezero Crater on Mars. Billions of years ago, this location was a lake, with a river flowing into the crater. The river brought sediment and formed a steep fan-shaped delta. It is assumed that valuable information about ancient Martian biology can be extracted from the rock deposits found here.
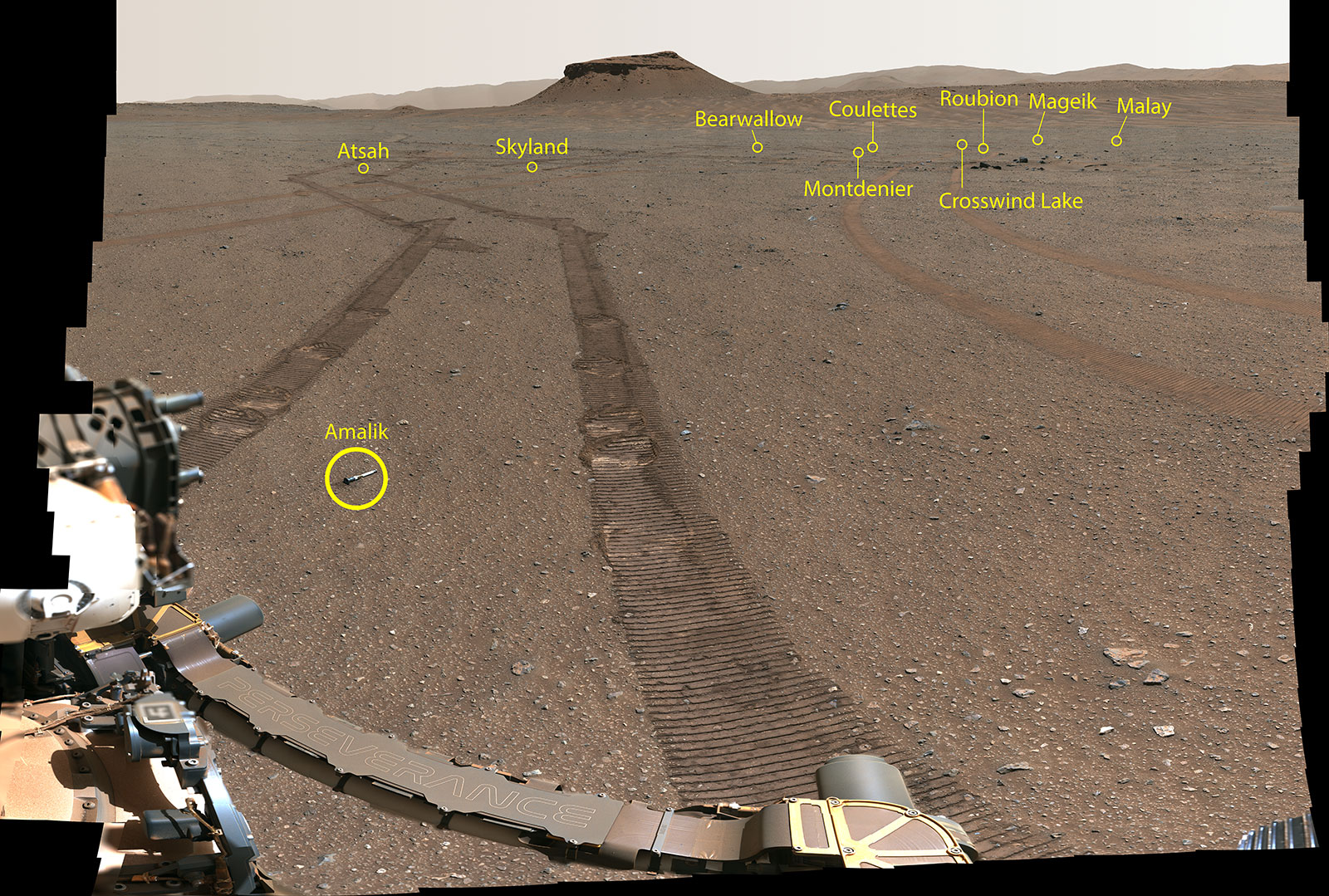
Perseverance drills into the selected sample, extracts material from it, places the sample in a container, and seals it securely. The rover collects two samples of each rock type. The idea is to leave one sample on board and discard the other for storage at specially marked locations within the Three Forks area inside the Jezero Crater. This will serve as a backup storage in case something happens to the rover and it is unable to deliver the containers.
The sample container itself is a special airtight titanium tube 15.24 cm (6 inches) long. Retrieving each container from within Perseverance takes over an hour, after which the rover carefully deposits the container in the sample storage zone on Mars.

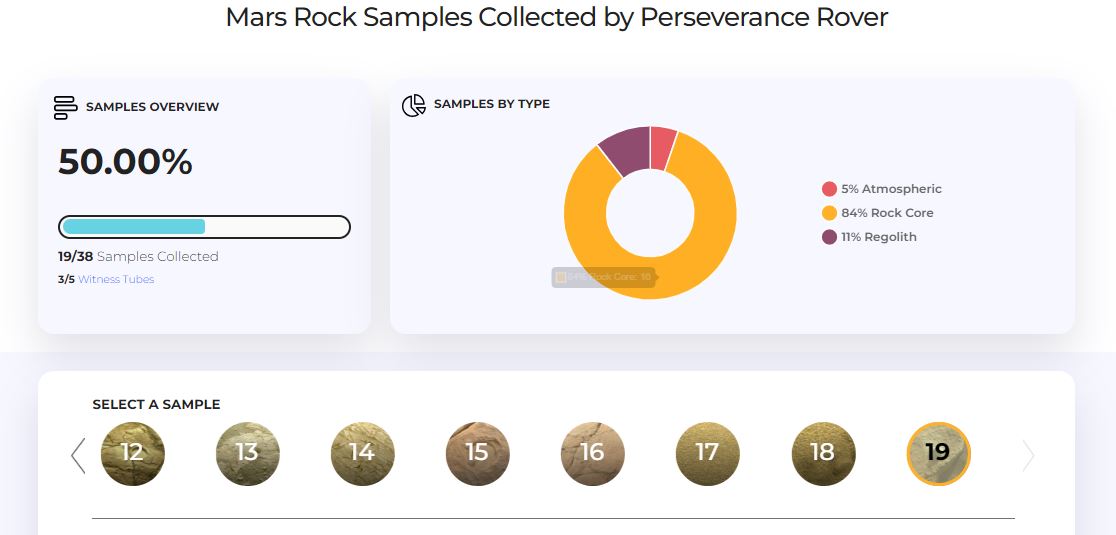
NASA has a website for the sample collection, which displays the process of material collection and provides detailed information about each sample.
The coordinates of each drop-off point are recorded so that Perseverance can return to them if needed. The samples are stored in the open, spaced apart from each other. The placement points were specifically chosen to allow easy retrieval by the robotic arm of the rover or by a future mission, potentially by helicopters, in case the rover malfunctions.
Returning samples from Mars to Earth is considered to be the most complex campaign of robotic space exploration ever undertaken. The Sample Fetch Rover, developed as a joint mission of the European Space Agency (ESA) and Roscosmos, was intended to be part of this campaign. However, Russia's invasion of Ukraine led to the cancellation of the program. ESA refused to launch the project on a Soyuz rocket. The mission was put on hold. Nevertheless, the underlying technology remains crucial for the Mars Sample Return Campaign.
Laura Bielenberg, an ESA graduate trainee, is working on an experimental setup called Rabbit (RAS Bread Boarding In-house Testbed). Here, an exact replica of the collection system that was supposed to be part of ESA Sample Fetch Rover is being reproduced. The sample transfer arm is still needed to load the titanium tubes with Martian samples and transport them to Earth. The robotic arm of ESA will collect them from the Perseverance rover and, possibly, from sample recovery helicopters as backup.
The work is being carried out at the Mars Yard test site, which is part of ESA's Planetary Robotics Laboratory at ESA ESTEC technical center in Noordwijk, Netherlands. Here, the Martian rocky landscape is accurately recreated.

Laura leaves copies of the titanium tubes for samples on the surface of the test site near the metal structure with the robotic arm and explores strategies for their collection, from autonomous detection to estimating the position of the sample tubes on Mars.
To detect tubes and estimate their position and orientation, the team of scientists uses not only cameras and sensors, but also neural networks. The neural network algorithm was developed in collaboration with Katholieke Universiteit Leuven in Belgium.
The tube collection setup is equipped with a navigation camera installed on top of the structure. The neural network receives images from this camera and searches for the titanium tubes in them. It also identifies points in the image to assess the position of the tube on the surface.

The team attempted to recreate the Martian environment, simulating similar lighting and landscape conditions. A mixture of direct and indirect lighting was designed, and imitation of different types of terrain was achieved by combining sand, pebbles and stones. All these actions were taken to improve the quality of neural network training.
The goal of the mission is to deliver samples from Mars to Earth. The data obtained from these samples and the technologies developed as part of Mars exploration programs, will one day help humanity to unravel the mysteries of the Red Planet.