Flying blind: How to navigate drones in total darkness
As autonomous drones become more integral to logistics, emergency response, and industrial applications, the challenge of navigation in GPS-denied environments has driven technological breakthroughs. While GPS remains the dominant method for outdoor navigation, it is ineffective in locations such as warehouses, underground facilities, dense urban landscapes, and disaster zones. Recent research and industry innovations, including a case study from QuData on autonomous drone navigation without GPS, are reshaping how drones operate without relying on satellite signals.
Unmanned aerial vehicles (UAVs) navigating without GPS must rely on alternative localization techniques such as visual odometry, LiDAR-based perception, and sensor fusion. By integrating data from cameras, inertial measurement units (IMUs), barometers, and radar systems, drones can build real-time environmental models that enable stable and accurate movement.
But while computer vision and LiDAR systems have been used for indoor navigation, they struggle in low-light conditions or spaces with repetitive features. Addressing these limitations, a team at MIT has introduced MiFly, a system that leverages radio frequency (RF) waves and backscattered signals to provide accurate localization with minimal hardware requirements.
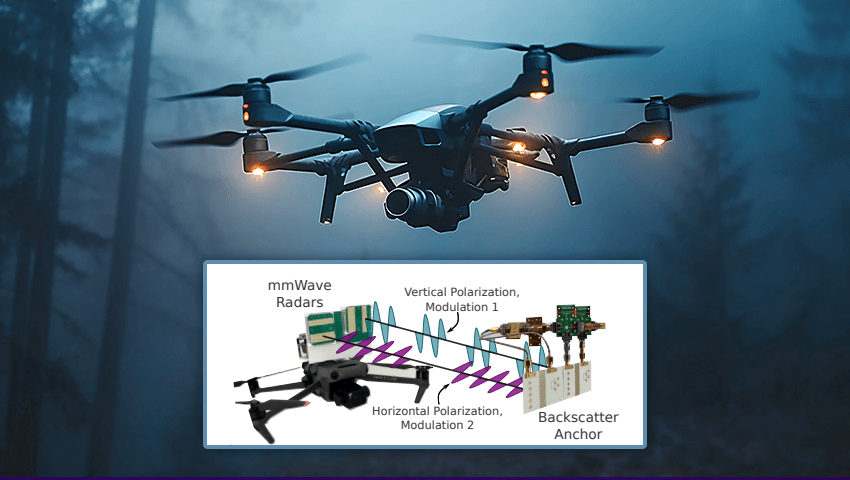
MiFly operates using a single, low-power tag that reflects millimeter-wave signals transmitted by a drone’s onboard radar. Unlike traditional systems that require multiple markers or complex infrastructure, MiFly’s approach is cost-effective and easier to implement. The drone detects the reflections from the tag, filtering out environmental noise through a modulation technique that assigns unique frequencies to distinguish the tag’s response from other reflections.
To ensure precise positioning, the researchers mounted two radars on the drone – one horizontal and one vertical. Each radar transmits signals with distinct polarizations, allowing the tag to separate and reflect them accordingly. This dual-polarization method helps the drone determine its exact spatial location, even in confined spaces with limited visual references. The data from these radars is then fused with the drone’s onboard IMU, which tracks acceleration, altitude, and orientation. This integration enables the drone to estimate its full trajectory in six degrees of freedom, including rotation, movement, and tilt adjustments.
During extensive flight tests in various indoor environments, such as dim tunnels, MiFly demonstrated an impressive localization accuracy of fewer than seven centimeters. Even when the tag was partially obscured, the system continued to deliver reliable results within a six-meter range. The research team believes this distance can be further extended with enhanced radar and antenna designs.
Beyond warehouse automation, this technology has broad applications, including disaster relief, hazardous environment inspections, and military operations. Drones equipped with GPS-free navigation can assist in search-and-rescue missions, navigate collapsed buildings, or explore underground structures without requiring an external signal. Additionally, the ability to maintain stable flight in GPS-denied conditions makes these drones ideal for communication relays in remote or obstructed areas.
The next phase of development involves integrating MiFly into a fully autonomous navigation system, allowing drones to chart flight paths independently using RF-based localization. As industries increasingly rely on drones for critical tasks, innovations like MiFly will be key in ensuring seamless and efficient operations, even in the most challenging environments.
Learn more technical details about this UAVs navigation approach in the paper on MiFly.